Transfer Function Discrete Time

Ece320 Lecture10 1c Discrete Time Systems Transfer Function Control Youtube
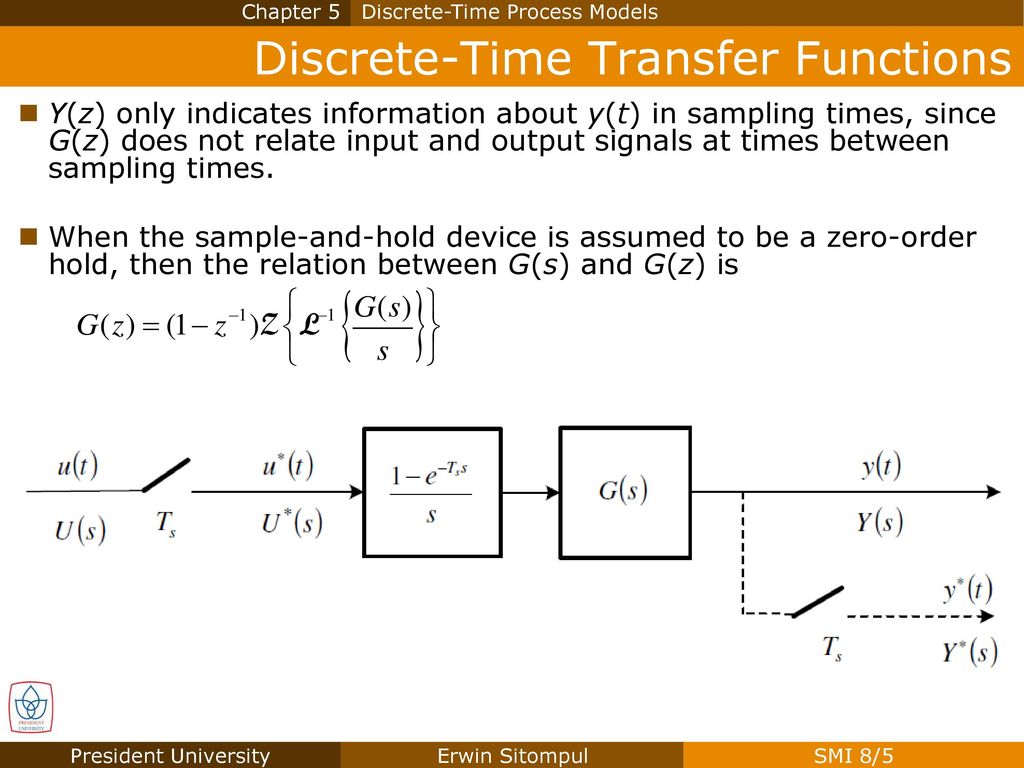
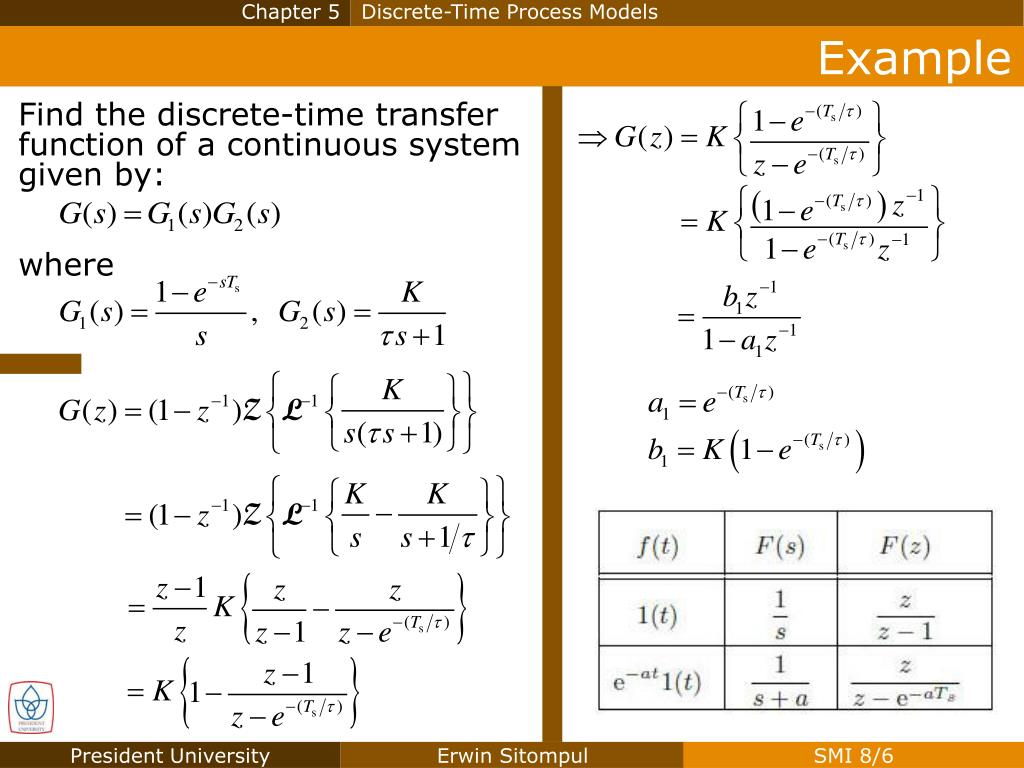
Discrete Time Transfer Functions Ppt Download

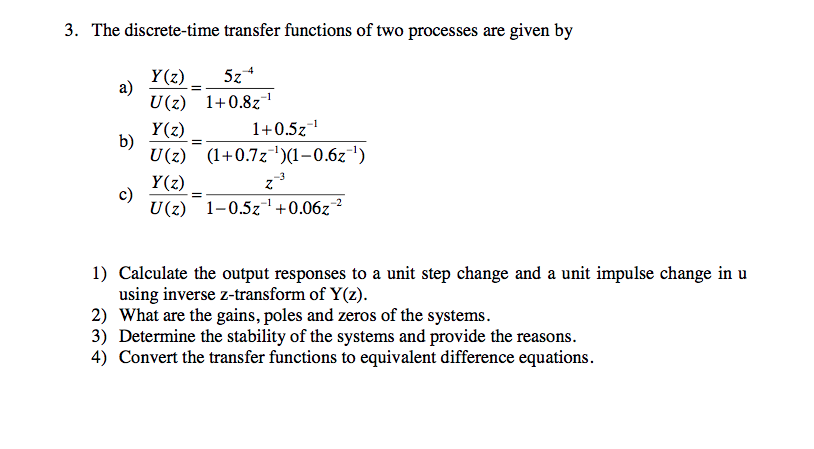
The Discrete Time Transfer Functions Of Two Proces Chegg Com
Http Www Ee Ic Ac Uk Pcheung Teaching De2 Ee Lecture 2011 20discrete 20time 20systems 20 X2 Pdf

Ece320 Lecture 9 1b Discrete Time System Design State Equations Youtube

1 Discrete Time Transfer Function Download Scientific Diagram

The definition is based on a non-commutative twisted polynomial ring which can be by the Ore condition extended into its quotient ring field of fractions.
Transfer function discrete time. Transfer functions are used for linear time-invariant systems. Sys filt numden creates a discrete-time transfer function sys with numerator s num and denominator s den. The Z-transform is used in discrete time systems to create a discrete time transfer function of the system with a set of poles and zeros.
What are Transfer Function Models. Safety How YouTube works Test new features Press Copyright Contact us Creators. For example to specify the discrete-time transfer function.
Transfer function in the z-domain Take the results from the previous slide and re-arrange. Let denote the impulse response of the filter. Transfer functions assume the system is initially at rest zero initial conditions.
As indicated on the Wikipedia article for the transfer function the usual substitute for the Laplace transform for discrete time systems is the Z transform. The transfer function is also called the system function 60. First lets consider the following discrete transfer function with and.
The syntax for creating discrete-time models is similar to that for continuous-time models except that you must also provide a sample time sampling interval in seconds. Transfer function models describe the relationship between the inputs and outputs of a system using a ratio of polynomials. In discrete-time systems the relation between an input signal and output is dealt with using the z-transform and then the transfer function is similarly written as and this is often referred to as the pulse-transfer function.
The model order is equal to the order of the denominator polynomial. In this page we are going to explain in more detail how the pole locations of a discrete-time transfer function relate to the corresponding time response. The sample time is left unspecified sysTs.

Ece320 Lecture10 1b Discrete Time Systems Transfer Function Control Youtube

How Do I Check The Stability Of A Discrete Transfer Function Electrical Engineering Stack Exchange
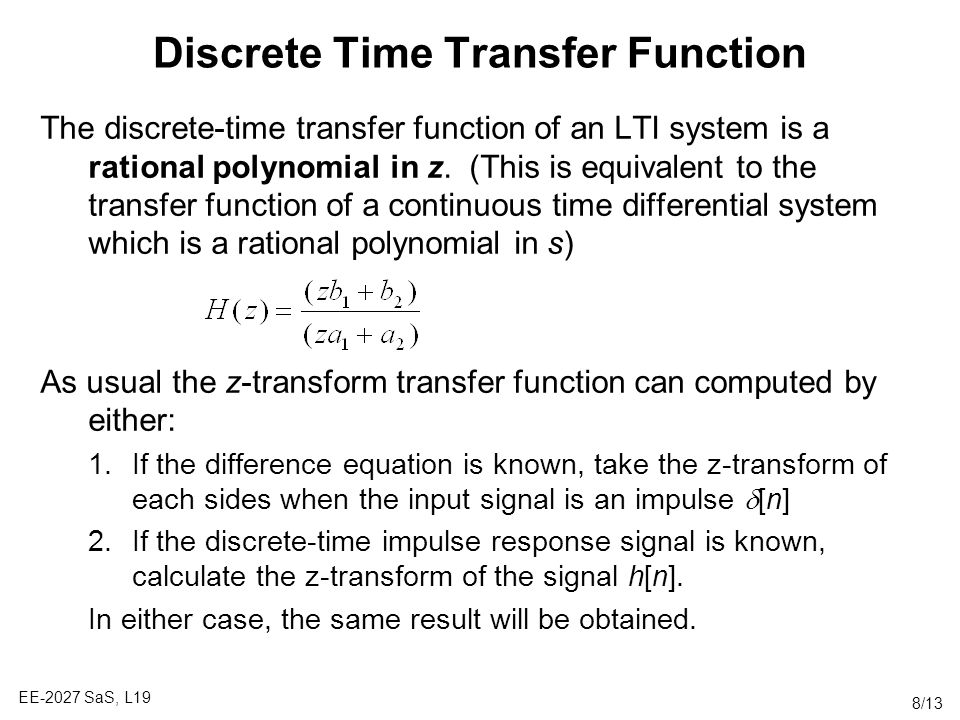
Lecture 19 Discrete Time Transfer Functions Ppt Download

Extension Of The Concept Of Transfer Function To Discrete Time Nonlinear Control Systems Semantic Scholar

Solved The Discrete Time Transfer Functions Of Two Proces Chegg Com
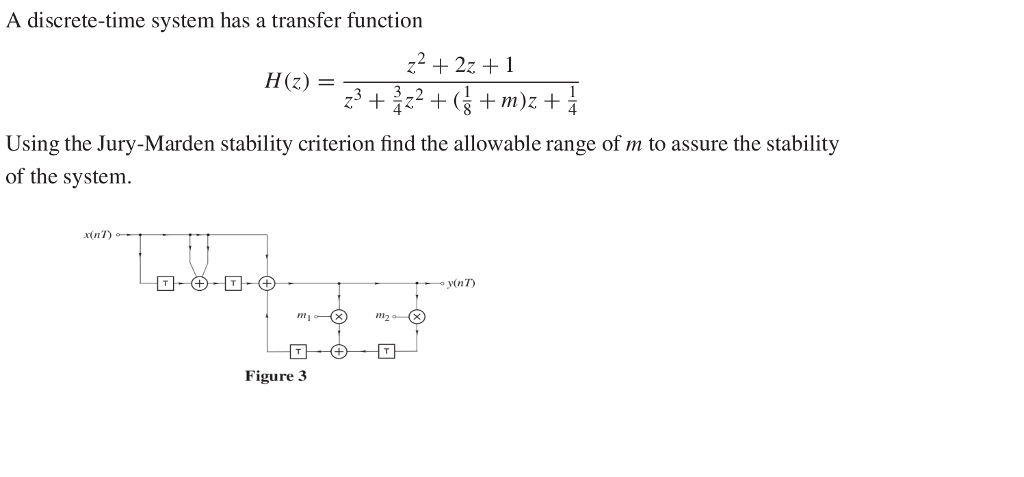
Solved A Discrete Time System Has A Transfer Function H Z Chegg Com
Ppt Discrete Time Transfer Functions Powerpoint Presentation Free Download Id 6576989

Chapter 4 Transfer Function And Block Diagram Operations 4 1 Linear Time Invariant Systems 4 2 Transfer Function And Dynamic Systems 4 3 Transfer Ppt Download

Discrete Time Model Of The Converter S Control Loop Where T D Includes Download Scientific Diagram
Ece320 Lecture 8 3b Discrete Time Systems Sampling Plants Zero Order Holds Youtube

The Transfer Function Of A Discrete Time Linear System Youtube

A Discrete Time System Has A Transfer Function Giv Chegg Com

Discrete Time Pid Controller Implementation Www Scilab Org